|
|
|
| App | Log in |
|
|
|
| App | Log in |
![]() ACC - Cruise Control Adattivo
ACC - Cruise Control Adattivo
Rating : 9
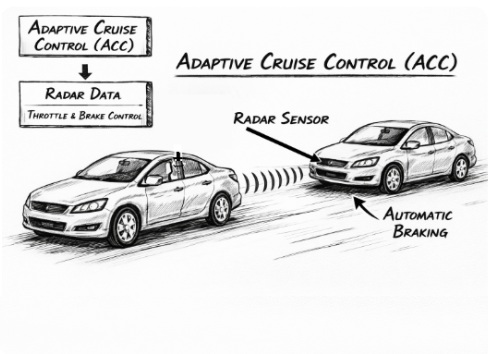
The Adaptive cruise control (ACC) is a driver-assistance system that maintains a set speed while automatically adjusting the vehicle’s pace to keep a safe following distance from the vehicle ahead.Unlike conventional cruise control, ACC “reads” the forward scene using sensors—typically radar (often paired with a camera)&mdas... (Read the full Tiiip)
0 pts from A_Partyns
| Evaluate | Where is this found? |
 | "Descrizione" about ACC - Cruise Control Adattivo by A_Partyns (13106 pt) | 2026-Feb-01 10:49 |
The Adaptive cruise control (ACC) is a driver-assistance system that maintains a set speed while automatically adjusting the vehicle’s pace to keep a safe following distance from the vehicle ahe ...
| Read the full Tiiip | (Send your comment) |

Read other Tiiips about this object in __Italiano (2)
Last update: 2012-11-01 14:03:52 |
© 2026 OverTheCode s.r.o.